理解 maps 的真正工作原理有可能相当困难,举个例子: 你是否曾经设置过 map 的 hint,即 make(map,hint),为什么它叫 hint ,而不是slice那样的 len?
你可以已经注意到,当你在 map 上使用 for-range 时,顺序与插入顺序不匹配。如果在不同的时间循环同一个 map,每次的结果可能都不一样。奇怪的是,同一个时间循环,顺序通常保持不变。
跟上,带你看看。
本文基于 Go 1.23 版本。
快速开始
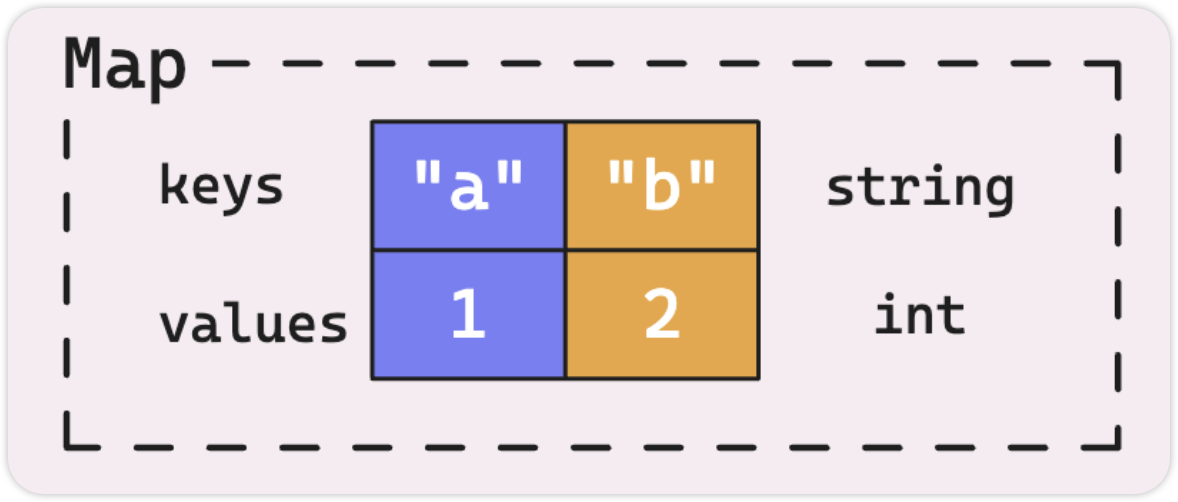
Go 中的 map,是一种内置类型,充当键值存储, key 可以是任何可比较的类型。
|
|
在该示例中,使用 make() 创建了一个空 map,其中 key 是字符串,value 是整数。
可以在声明 map 的同时赋值键值对。
|
|
删除的方法是 delete(m,"a")
map 的零值是 nil,并且 nil map 在某些方面有点像 empty map,可以尝试在其中查找 key,golang 不会发生 panic 。
如果搜索不存在的 key,Go 会提供该类型的零值。
|
|
警告: 但不能对 nil map 添加新的键值对!
事实上, Go 处理 map 的方式与处理 slice 的方式非常相似,两者皆以 nil 开始,for-range 也不会发生 panic,Go 将任何类型的零值视为有用的东西,而不是导致程序崩溃的东西,除非当你做了一些非法的事情,例如尝试像 nil map 添加新的键值对,或者对 nil slice 越界索引。
关于 Go 中的 map,应该了解以下几点:
- map 的遍历是乱序的
- map 非线程安全,并且数据竞争时会发生 panic
- 可以通过
ok来检查 key 是否存在_,ok := m[key] - map 的 key 必须是可比较的
那么,可比较类型到底是什么?
简单的很,如果可以使用 == 来判断相同类型的两个值,那么该类型被认为可以比较。
|
|
显然,上面的代码无法通过编译,map 只能与 nil 比较。
同样的规则适用于其他不可比较的类型,例如slice、函数或包含slice或map的结构等。
但这里有个小技巧,接口是可以比较的,也可以是不可比较的。
什么意思? 即可以定义一个空接口为键的 map ,而不会编译出错,但可以运行时出错。
|
|
一切看起来都很好,直到尝试分配一个不可比较的类型作为 key 。这比编译错误更难处理,应当避免使用 interface{} 作为 map 的 key 。
Map 剖析
让我们由浅入深,细品,别陷入 Go 源码的具体实现。
实际上,键值对是一个抽象,底层是由许多称为 bucket 的较小单元阻塞。
|
|
注意看,这个 buckets 是指针,这就是为什么将 map 分配给变量或传递给函数时,在外部的修改也会影响到这个值。
|
|
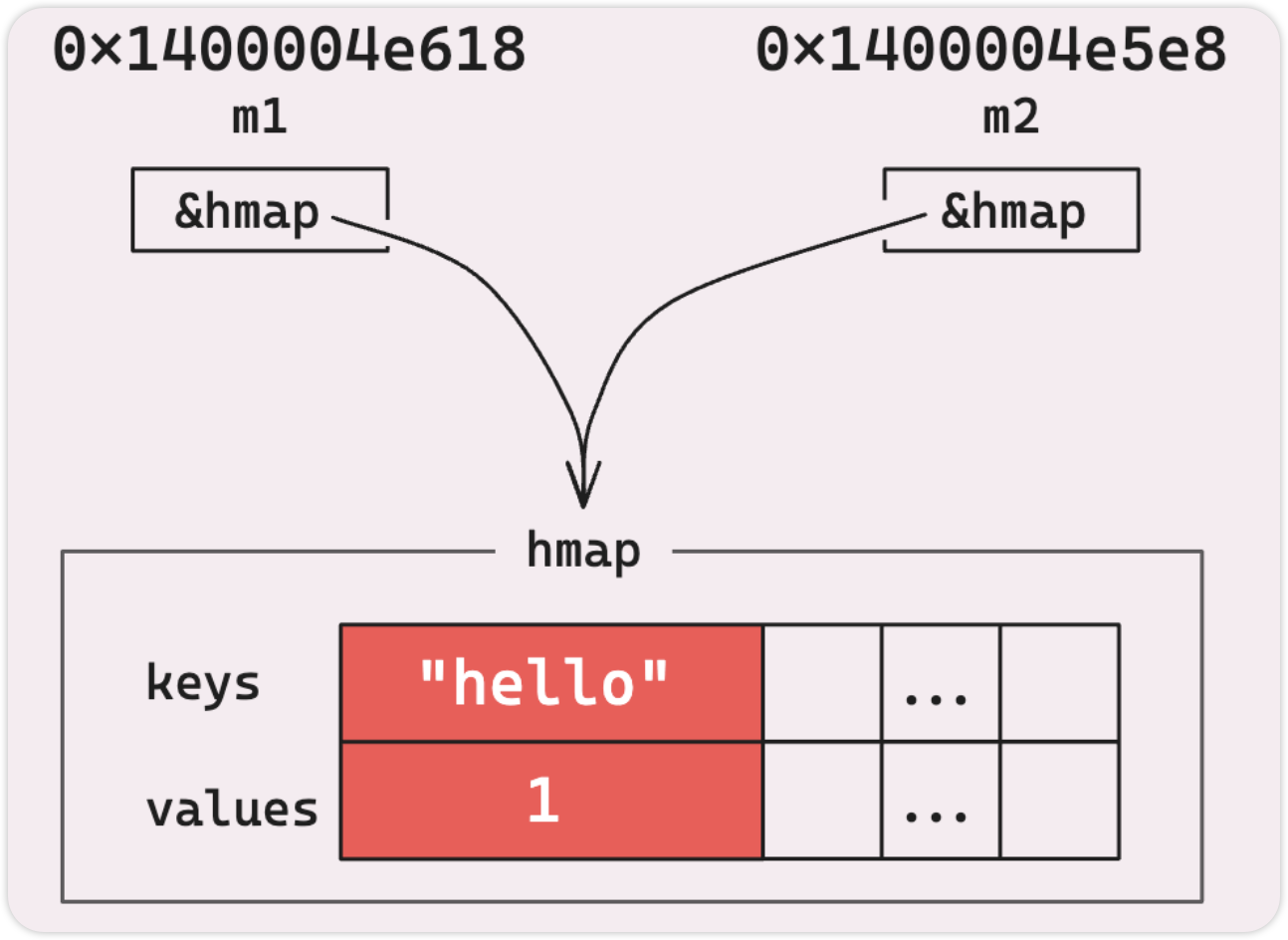
map 是指向运行时 hmap 的指针,但它们不是引用类型,如果如下所示的更改,它不会反映到调用者中。
|
|
在 Go 中,一切都是按值传递的。真正发生的情况有点不同,当你将 map m1 传递给 changeMap 函数时,Go 会创建 *hmap 结构的副本。因此,main() 中的 m1 和 changeMap() 函数中的 m2 从技术上讲是指向相同 hmap 不同的指针。
每个存储桶最多只能容纳 8 个键值对,如下图所示。
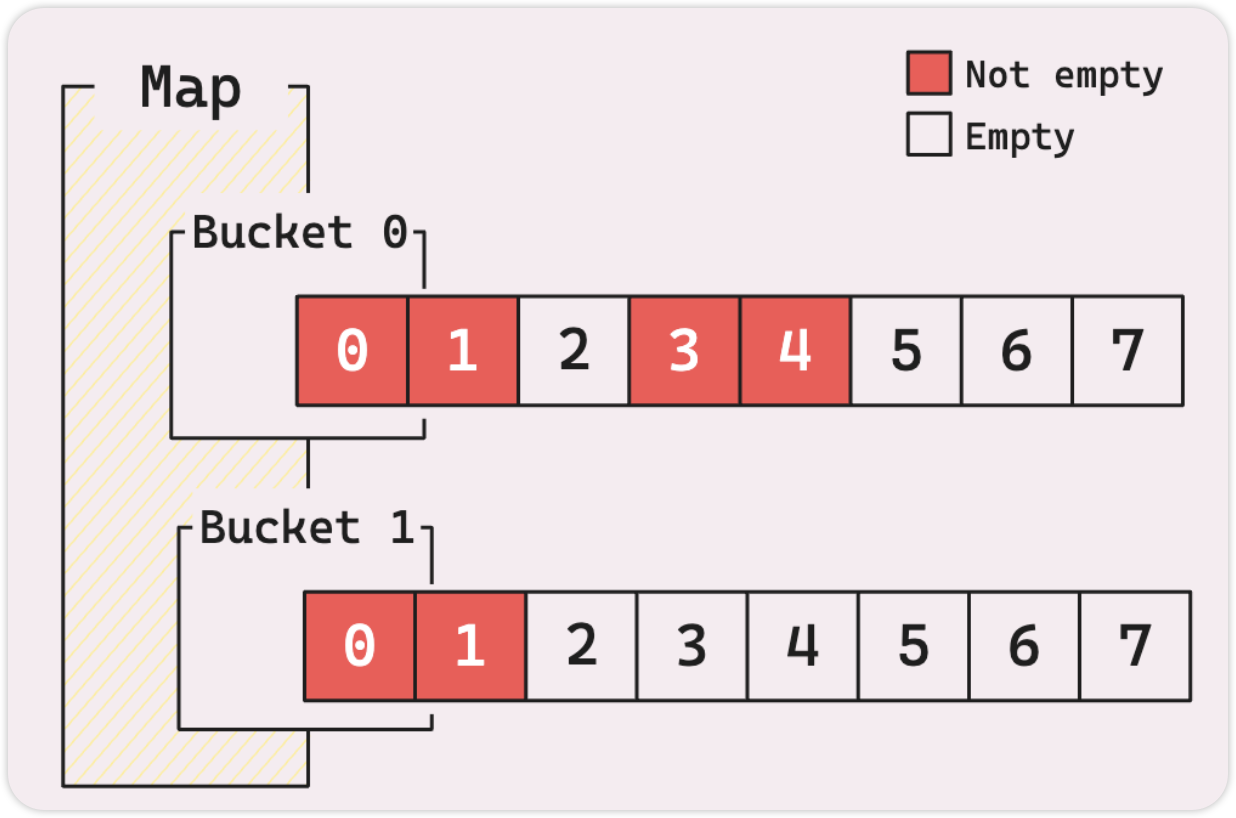
上面的map有2个bucket, len(map)是6。
当添加键值对时,会根据 hash(key, seed) 将键值对放入其中一个存储桶中。
看看以下场景: 有一个 nil map 并为其分配键值对
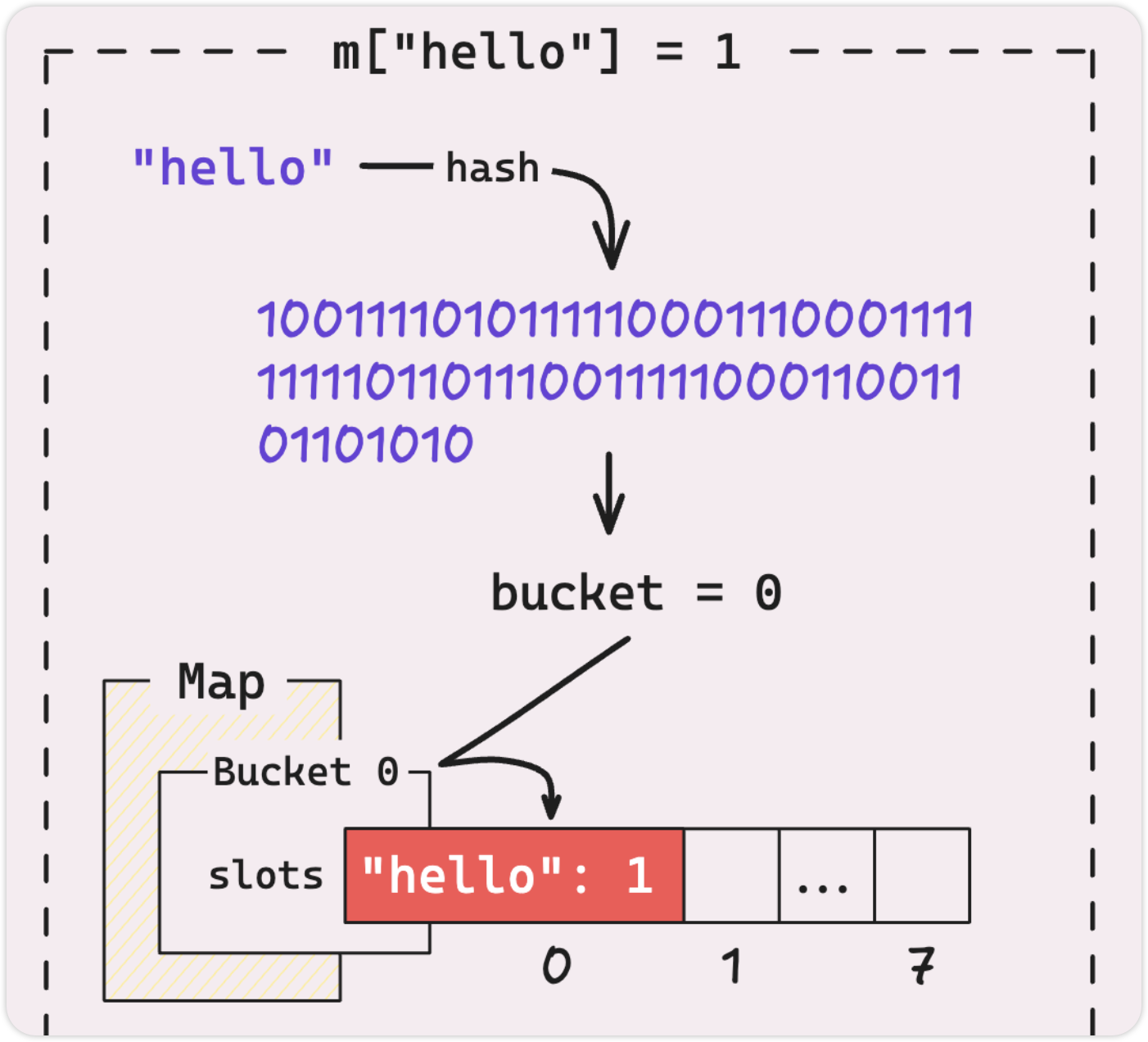
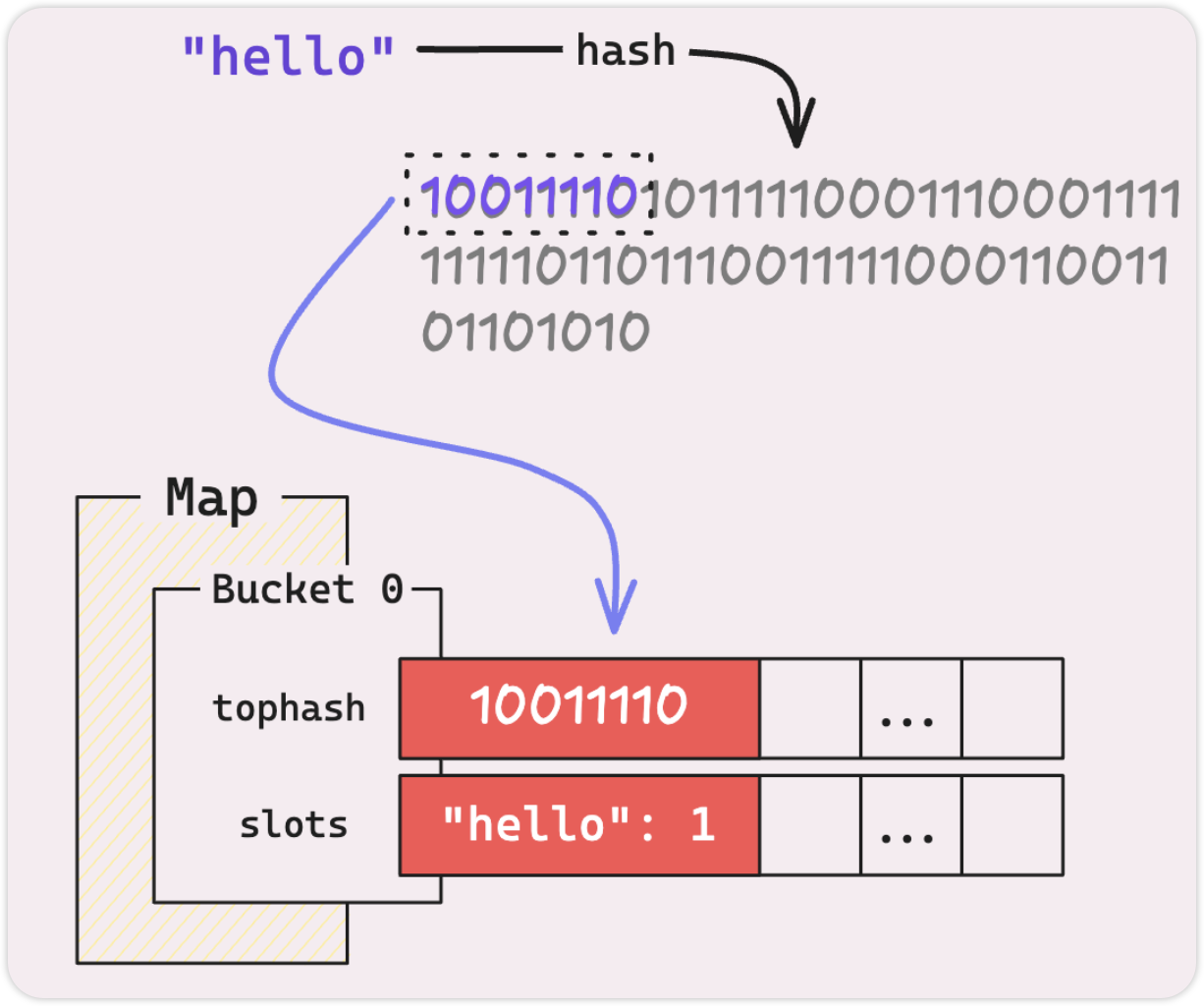
它首先将“hello”散列到一个数字,然后获取该数字并按存储桶的数量对其进行修改。
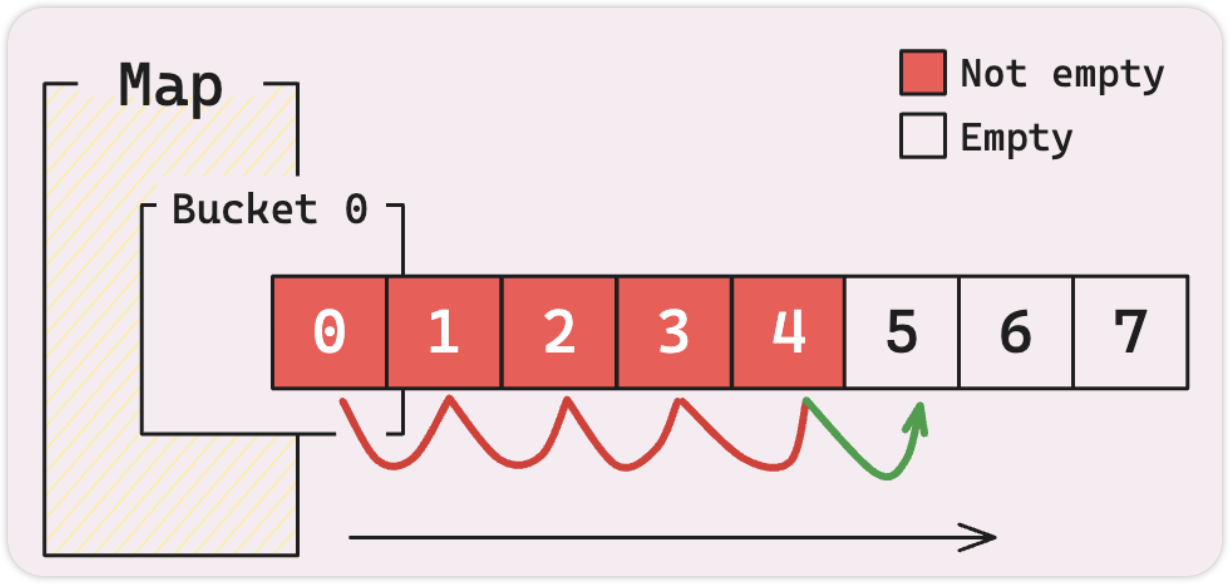
由于我们这里只有一个存储桶,任何数字 mod 1 都是 0,所以它会直接进入存储桶 0,当您添加另一个键值对时,也会发生相同的过程。它将尝试将其放入存储桶 0 中,如果第一个 bucket 已被占用或具有不同的密钥,它将移动到该存储桶中的下一个 bucket。
看一下hash(key, seed) ,当您在具有相同键的两个map上使用 for-range 循环时,您可能会注意到键以不同的顺序出现:
|
|
这怎么可能?map a 中的键“a”和map b 中的键“a”不是以相同的方式散列吗?
但事情是这样的,虽然 Go 中用于 map 的哈希函数在具有相同键类型的所有 map 中是一致的,但该哈希函数使用的seed对于每个 map 实例是不同的。因此,当您创建新 map 时,Go 会专门为该 map 生成一个随机种子。
一个 bucket 的长度最大是 8,那满了会怎样?
当桶开始变满,甚至几乎满时,根据算法对“满”的定义,map 将触发扩容,这可能会使 main buckets 的数量增加一倍。
有趣。
当我说“ main buckets” 时,我正在设置另一个概念:“overflow buckets”。当遇到高碰撞的情况时,这些就会发挥作用。试想: 存在 4 个bucket,但其中一个由于高冲突而完全装满,另外 3 个则空着。
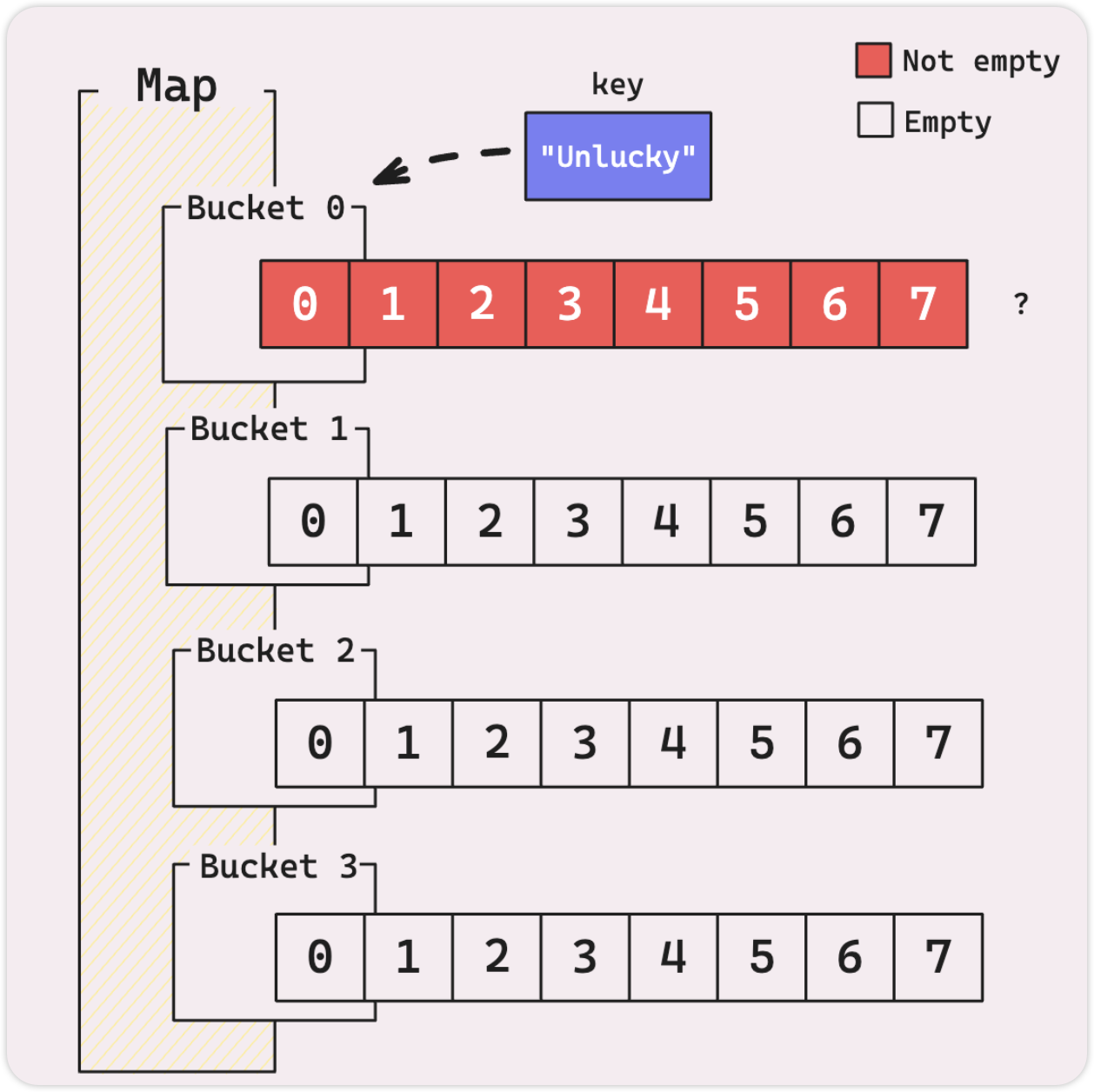
是否真的需要将 map 翻倍扩容到 8 个 buckets? 仅仅是需要添加一个不幸也落到 bucket 0 的键值对?
No! 这样太浪费了。
Go 通过创建链接到第一个 bucket 的 overflow bucket 来更有效处理这个问题。新的键值对存储在这个溢出桶中,而不是强制完全扩容。
当满足两个条件之一时,Go 中的 map 就会扩容: 要么溢出桶太多,要么 map 过载(负载因子太高)。
对应这两种条件,也有两种扩容方式:
- 翻倍扩容(过载时)
- 保持相同大小,但重新分配 bucket 中的数据。(当溢出桶太多时)
目前,Go 的负载因子设置为 6.5,这意味着 map 设计为每个 bucket 平均维护 6,5 个,大约是 80%的容量,当负载因子超过此阈值,map 视为过载。此时,将通过分配一个新的 buckets 数组,该数组是大小是当前的两倍,然后元素重新散列到新的 buckets 中。
我们通常认为在map中访问和赋值是 O(1),对吧?但事情并不总是那么简单。
bucket 中的元素越多,速度就越慢。
当您想要添加另一个键值对时,不仅仅是检查存储桶是否有空间,而是将键与该存储桶中的每个现有键进行比较,以决定是添加新条目还是更新现有条目。
当您有溢出桶时,情况会变得更糟,因为您还必须检查这些溢出桶中的每个插槽。这种速度减慢也会影响访问和删除操作。
但 Go 团队强呀,他们为我们优化了这个比较。
还记得我们对键“Hello”进行散列时得到的散列吗? Go 不只是把它扔掉。它实际上将“Hello”的 tophash 作为uint8缓存在存储桶中,并使用它与任何新密钥的 tophash 进行快速比较。这使得初始检查超级快。
比较tophash后,如果它们匹配,则意味着密钥“可能”相同。然后,Go 继续进行较慢的过程,检查密钥是否实际上相同。
为什么使用 make(map,hint) 创建新 map 不提供确切的大小而只提供 hint?
make(map, hint)中的hint参数告诉Go您期望map保存的元素的初始数量。此 hint 有助于最大限度地减少添加元素时 map 需要扩容的次数。
由于每个扩容操作都涉及分配新的存储桶数组并复制现有元素,因此这不是最有效的过程。从较大的初始容量开始可以帮助避免一些成本高昂的扩容操作。
当您添加更多元素时,存储桶大小这样扩容:
| Hint Range | Bucket Count | Capacity |
|---|---|---|
| 0 - 8 | 1 | 8 |
| 9 - 13 | 2 | 16 |
| 14 - 26 | 4 | 32 |
| 27 - 52 | 8 | 64 |
| 53 - 104 | 16 | 128 |
| 105 - 208 | 32 | 256 |
| 209 - 416 | 64 | 512 |
| 417 - 832 | 128 | 1024 |
| 833 - 1664 | 256 | 2048 |
为什么 hint= 14 会产生 4 个桶?我们只需要 2 个桶就可以容纳 14 个元素。
这就是负载因子发挥作用的地方,当 hint=13,有 2 个 buckets,负载因子为 13/2=6.5,达到阈值但未超过。因此,当 hint=14,负载因子超过 6.5,触发翻倍扩容。
hint=26也是如此,26/4=6.5,当 hint>26,map 需要扩容以有效容纳更多元素。
散列
为什么无法获取 map 元素的地址? 为什么不同时间不能保证范围内的顺序?
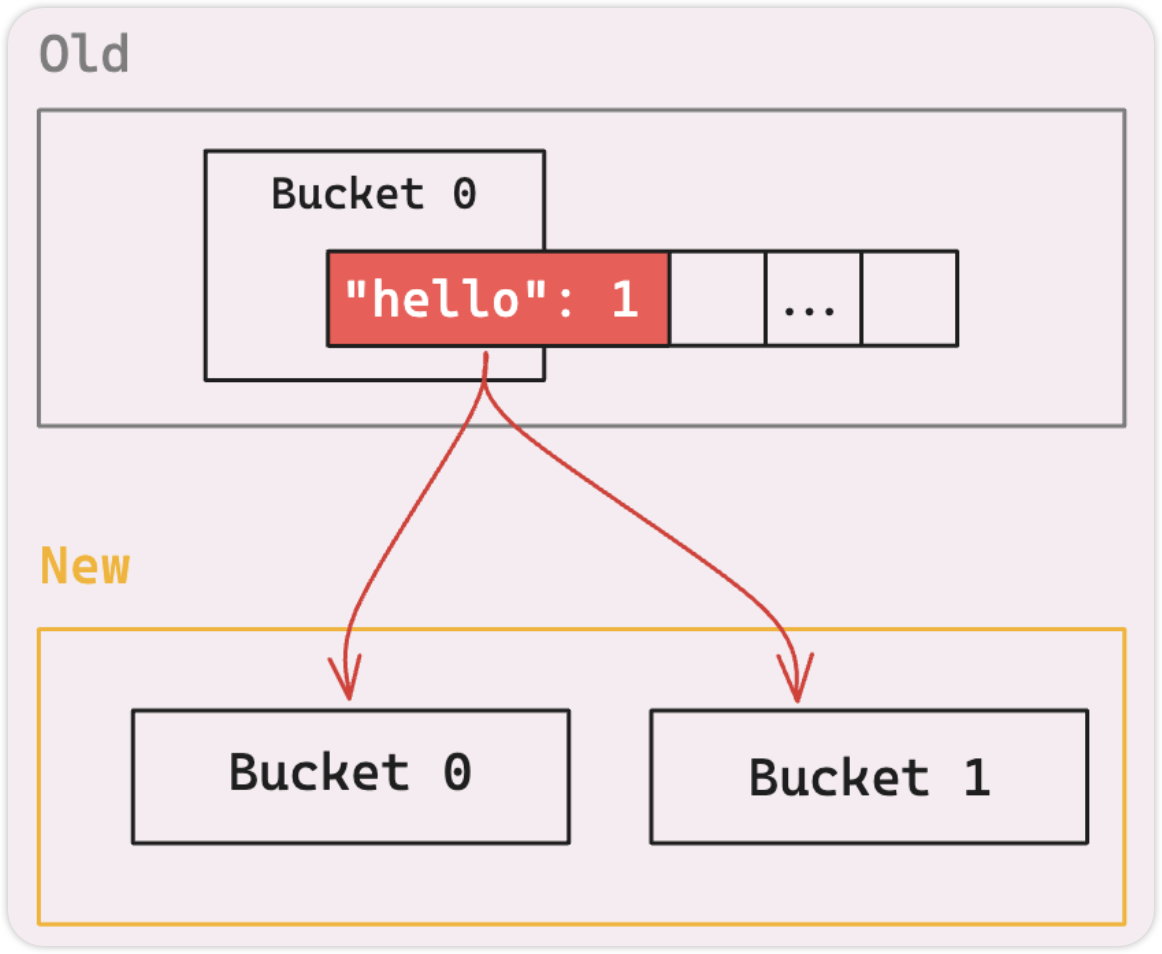
当 map 增长时,会分配一个新的 buckets 数组,是旧 buckets 的两倍,旧 buckets 中所有元素都变得无效,需要移动到新内存地址的 buckets 中。
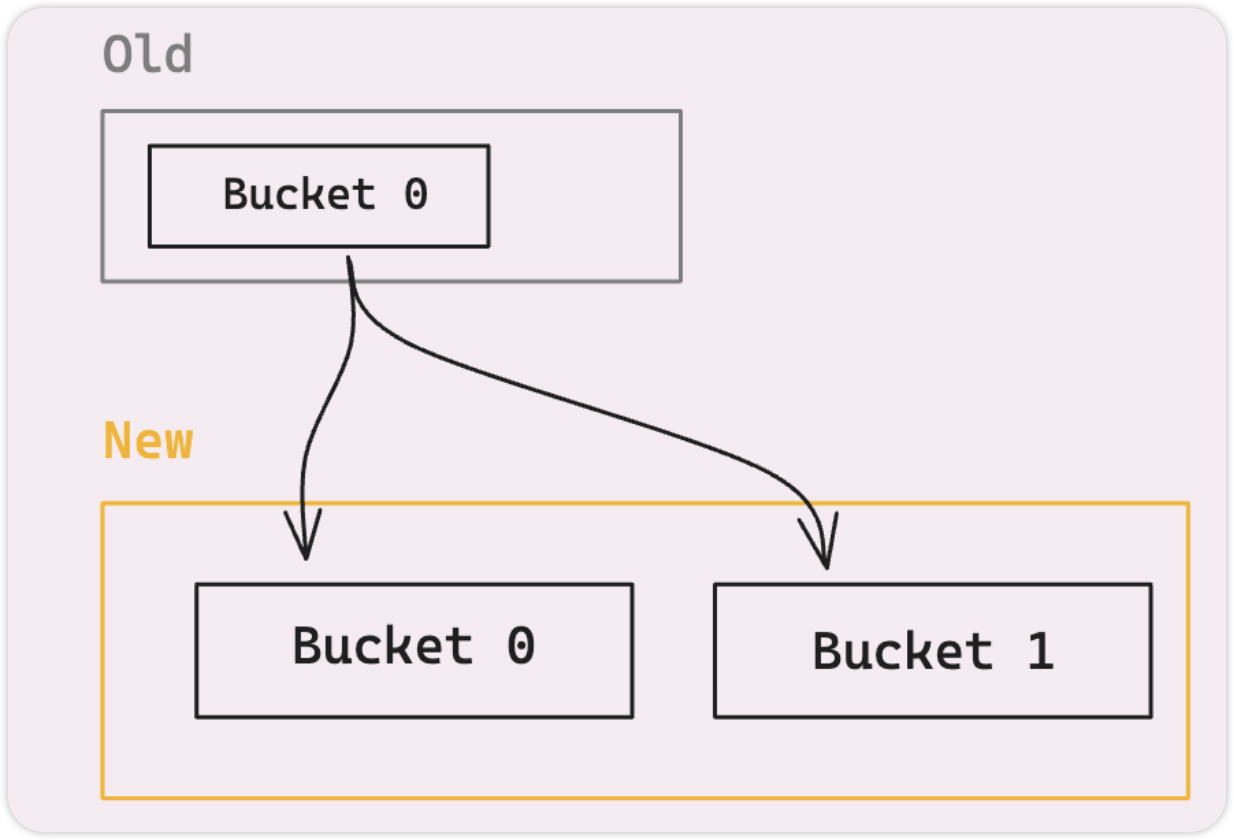
如果 map 很大,一次性的移动想当昂贵,可能在相当长的时间内阻塞 goroutine。为了避免这种情况,Go 使用增量的方式,一次只重新哈希一部分元素。你的程序可以保持平稳运行,不会突然出现滞后。
从旧 buckets 迁移到 新 buckets 什么时候发生?
两种情况:
- 添加新的键值对
- 从 map 中删除键值对
例如 map["hello"]=2 时,实际第一件事是清空包含 hello 的旧 buckets。
如果旧 buckets 有溢出桶, map 也会将这些 overflow buckets 的元素移动到新 buckets,移动所有元素后, map 通过在 tophash 字段将旧桶标记为 evacuated 。
先这么多哈,Go map 确实比这更复杂,很多小细节先不细说。
参考
本文翻译于 Go Maps Explained: How Key-Value Pairs Are Actually Stored